Our research group have several on-going projets, which are summarized below. More information about each project can be found in the individual project pages.
Future Cropping

The aim of Future Cropping is to increase crop yield and quality without increasing the environmental impact.
The overall aim of Future Cropping is to utilize the potential benefits of precision farming and data communication, by integrating large amounts of data from agro- and environmental technologies with area and climate data. Based on these data, a decision tools will be developed as well as new technologies to support real time decision making in the field.
SAFE
The aim of the SAFE project is to develop autonomous agricultural machinery that will be able to harvest green biomass and cultivate row crops – without animals or humans being exposed to any type of safety risk. Today, autonomous agricultural machinery is already being used in the fields. However, this machinery requires continuously monitoring in order to ensure the safety of humans and animals.
RoboWeedMaps

When farmers are to decide how to 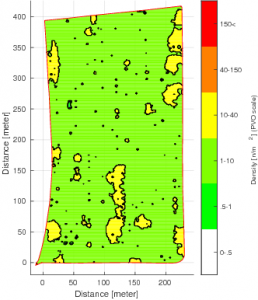 control weeds, they need to know which weeds are present in their fields, and their densities, as this influence which herbicides to choose and the dosages to use. In the RoboWeedMaps project, we seek to automatically detect and classify weeds in images in order to map their distributions in fields. These maps allow for the farmer to see if weeds need to be controlled and if so, which herbicides to use. It is estimated that by utilizing weeds maps for controlling weeds, herbicide dosages can be decreased by up to 75% without loss of yield.
control weeds, they need to know which weeds are present in their fields, and their densities, as this influence which herbicides to choose and the dosages to use. In the RoboWeedMaps project, we seek to automatically detect and classify weeds in images in order to map their distributions in fields. These maps allow for the farmer to see if weeds need to be controlled and if so, which herbicides to use. It is estimated that by utilizing weeds maps for controlling weeds, herbicide dosages can be decreased by up to 75% without loss of yield.
ASSIST

The aim of the ASSIST project is to investigate modern computer vision and deep learning technology on time-lapse microscopy imaging of fertilized human embryos.
The objectives are to improve clinical workflow at fertility clinics and provide objective and possibly new and undiscovered measures of embryo viability directly related to the probability of pregnancy.
CloverSense
[CloverSense Summary and image that links to main page]
To see description and content of old projects please click here